
Introduction To AITS:
We developed a system that we call ”Artificially Intelligent Targetting System” . This system detects human infiltration near borders, terrorist activities and shot them down after force command from the center alerted by our system or by its own if there is no response from the center. It also detects small movements near borders which can also be alerted to the state by the system which can call backup from the nearby state authorities for further investigation.
Over Nights,we can also install nightvision which can capture heat and infrared images from infrared camera. This system can also detect Firearms which can also be a crucial part for getting intel of opponents and then getting rid of them with apt action plan.
Working Modes:
Mode 1: Human Infiltration
Mode 2: Motion Detection
Mode 3: FireArm Detection
Mode 4: Infrared Detection
Mode 1: Human Detection and Infiltration Detection
Around Border Lines , we have places like ‘White desert in Rann of Kutch’ , ‘Thar Desert in Rajasthan’,’Siachin Glacier in Indian occupied Kashmir’ ,all these places are of extreme weather conditions for human survival and our system can be an aid to our BSF army personnel.
This technology can also be used for Automated Weapons for shooting the opponents if trained for the opponents before war exercise.
Mode 2: Motion Detection
Terrorist Groups can also infiltrate through camouflage,hiding through the bushes which can be detected with motion detection. This motion detection can also aid in detecting the missiles which are targeted into our territory and use anti-ballestic missiles against them
Model 3:Firearm Detection
This system can also detect Firearms which can also be a crucial part for getting intel of opponents and then getting rid of them with apt action plan.
Model 4: Infrared Detection
Over Night, army personnel are ineffective in clearly recognizing and intercepting any unpermitted intrusion but the infrared Cameras installed over our system can do this and our system can recognize those images and can alert the officials and necessary steps can be taken.
- Arduino Nano ATMEGA processor
- 2 x Laser Module
- 4 x Servo Motor
- A Mobile Camera
- CPU or computing processor
How did we come so Far?
For Hardware Implementation we made use of the Arduino nano, servo Motors and Laser Module and configured it for X-Y Rotation using Arduino IDE and also made use of a Python script to take input a video feed and map the general frame coordinates to the actual rotation of the motors and also made use of the calliberation script that will calliberate the range for the camera.
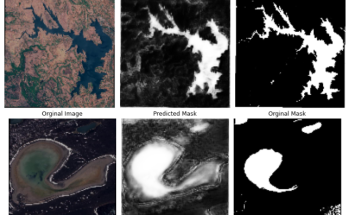
For Software Implementation we made use of machine learning and AI to record the frames of images through the camera then detect the faces through facial Recognition and pass the detected rectangles mid coordinates.

I really like what you guys are usually up too.
This kind of clever work and exposure! Keep up the very good works guys
Love to see this every day !
Could you clarify some things? You’ve written a well thought out post though, so kudos!
When I originally left a comment I seem to have clicked the -Notify me when new comments are added-
checkbox and now each time a comment is added I recieve 4
emails with the exact same comment. Perhaps there is a means you can remove me from that service?
Thanks!
I do not even know the way I finished up right here, however I thought this submit was great.
I do not know who you might be however definitely you’re going
to a famous blogger for those who are not already.
Cheers! adreamoftrains website hosting
Like!! Thank you for publishing this awesome article.